联系我们
了解更多详细信息,请致电 0755-8923 38190755-8923 3406
或给我们留言
新闻详情您的位置:首页 > 行业新闻 > 详细内容
摇摆式称重传感器 - 传感器的支撑结构
来源:http://www.ligentcn.com/news/1227.html发布时间:2018-10-25
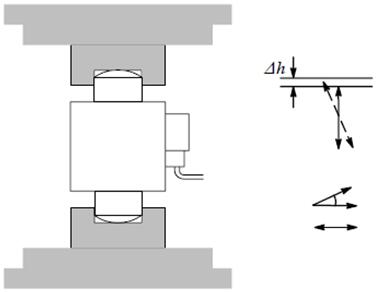
1. 自归中摆式传感器(106HS/106RS……)
利用了稳定平衡的物理特性,在重量加载偏心时,能自主地回到起始点而设计的传感器。作为摆动体的传感器具有负荷引导面,其曲率半径大于传感器高度。对初始位的摇摆会导致加载点升高,从而使传感器自归中。
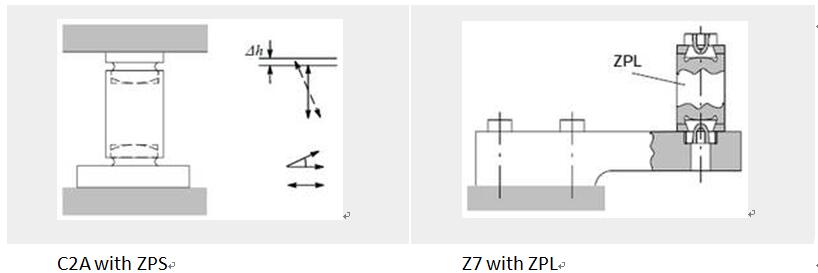
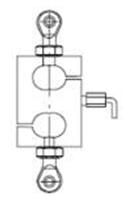
2. 摆支承和摆支承座(563YHM4/563YSM3)
带有摇摆支承和支承座的悬臂梁式传感器也能达到自归中的性能,这就使制造高精度料灌秤成为可能。
摆柱在摇摆倾斜后加载点相对于原来位置会被略加提高。由此产生了一个回复力,这个回复力使系统回到初始状态,因此摆支承和摆支承座可看成是自归中的。
同时这个系统也非常容易安装,复杂的横向拉杆就不再被需要。
通过压头偏移量的限位保护可以控制系统良好的回位性能。压头水平位移被限定在一定范围内,且侧倾在3°的偏移内,对传感器没有明显误差。
当然为了安全的需要,系统应保证有抬升保护和坠落保护。
3. 锥尖和锥座(我们公司没有)
对于电子衡器的“锥尖”和“锥座”,相当于机械秤的“刀口”。这一安装附件尤其适应于高精度要求的称重领域。但这种应用对动态负荷或振动是非常敏感的。
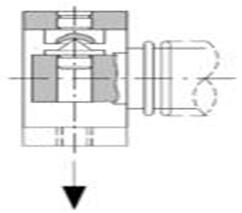
4. 回扭机构:
回扭机构应用于双弯曲梁传感器中,并使拉力或压力载荷作用在一条直线上。
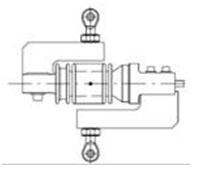
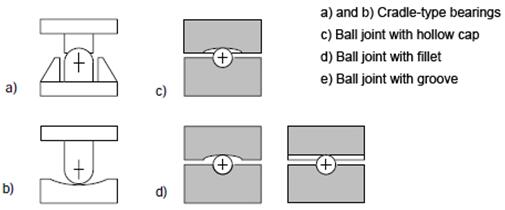
5. 关节轴承连接:
关节轴承适用于准静态的拉式负荷(负荷频率小于10赫兹),其连接的方式通常呈十字交叉形式。
6. 固定支座和滚轴支座
下图显示了由HBM提供的固定支座,以工字梁为主体,在两侧加上辅助加强筋,形成了一个弯曲薄弱点。固定支座在水平方向固定住了容器,所以这一方法可以不用限位机构。但是要注意的是,传感器的受力变形会引起固定支座微小的弯曲,从而引起测量信号的误差,可这一误差可以通过校准传感器的方法来减小。HBM 固定支座:
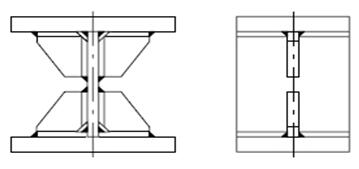
下图:展示了一个滚轴支座的示意图。相对于固定支座的测量误差,滚轴支座不会出现该问题。因为这里没有弯曲应力可言,只发生细微的滚动摩擦。可以看到,滚轴支座的约束性能是不如固定支座,但是在不同的应用中有时候限位装置也不是一定需要的。 只有在精度要求不高的情况下,且料灌内物质是液体或者可以自由流动的物质的时候,才推荐固定或者滚轴支座。
- 应变式称重传感器的分类和特点2018-11-24
- 选择悬臂梁称重传感器应该注意什么2018-11-24
- 电阻应变式称重传感器的原理2018-11-16
- 称重传感器用到的各种定理、法则、效应2018-11-14
